Downwash-aware Control Allocation
for Over-actuated UAV Platforms
1 Beijing Institute for General Artificial Intelligence
2 Department of Automation, Tsinghua University
3 College of Engineering, Peking University
4 Academy of Arts & Design, Tsinghua University
5 Institute for Artificial Intelligence, Peking University
6 School of Artificial Intelligence, Peking University
*corresponding author
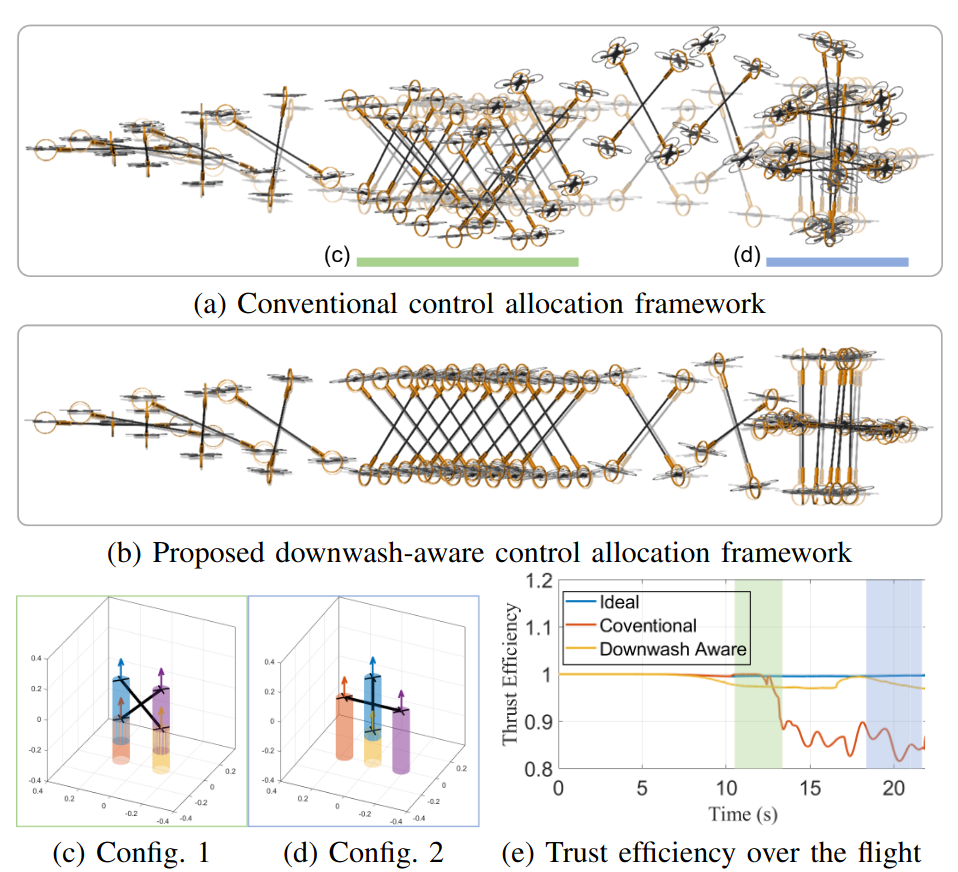
Comparison between the proposed control allocation framework with conventional ones when tracking the reference trajectory indicated by the light grey. (a) Conventional control allocation framework fails to track stably as downwash effects appear twice, highlighted in green and blue. Exemplar configurations solved by the conventional control allocation framework may lead to (c) two and (d) one pair of downwash effects, where arrows and cylinders stand for the thrust forces and downwash flows, respectively. (b) The proposed framework avoids downwash effects and thus maintains both stable tracking performance and high trust efficiency over the challenging flight. (e) We further compare the thrust efficiency of ideal (the reference trajectory), conventional, and our proposed allocation frameworks.
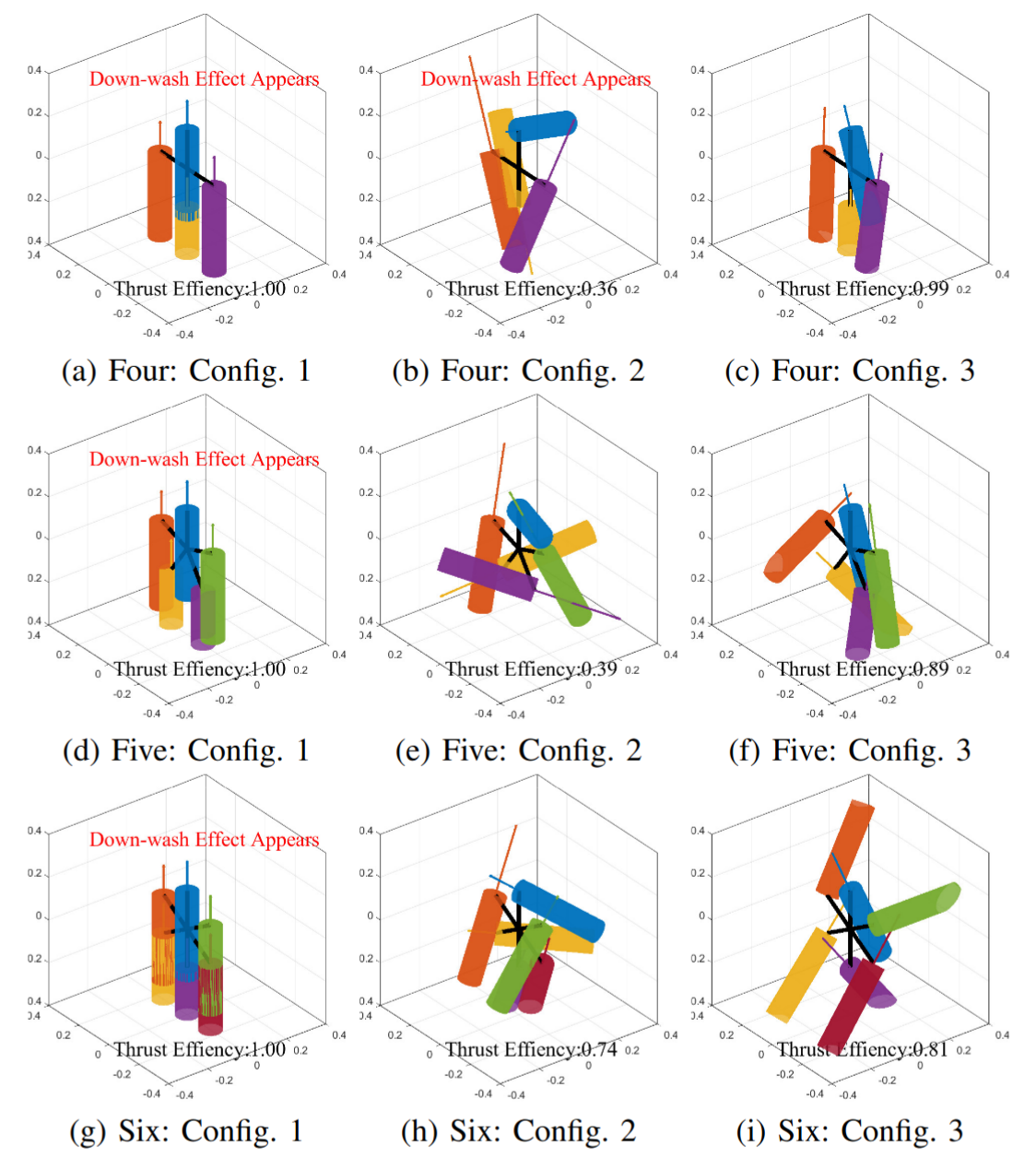
Thrust efficiency and downwash effect avoidance for different over-actuated UAV platforms. Infinite number of thrust force configurations can generate same required wrench command with different thrust efficiencies. For each platform, three configurations are provided as examples. Four, five, six refer to the platform with 4, 5, or 6 3-DoF thrust generators, respectively.
Abstract
Tracking position and orientation independently affords more agile maneuver for over-actuated multirotor Unmanned Aerial Vehicles while introducing undesired downwash effects; downwash flows generated by thrust generators may counteract others due to close proximity, which significantly threatens the stability of the platform. The complexity of modeling aerodynamic airflow challenges control algorithms from properly compensating for such a side effect. Leveraging the input redundancies in over-actuated Unmanned Aerial Vehicles, we tackle this issue with a novel control allocation framework that considers downwash effects and explores the entire allocation space for an optimal solution. This optimal solution avoids downwash effects while providing high thrust efficiency within the hardware constraints. To the best of our knowledge, ours is the first formal derivation to investigate the downwash effects on over-actuated Unmanned Aerial Vehicles. We verify our framework on different hardware configurations in both simulation and experiment.
Demo
Team







Bibtex
@inproceedings{su2022down,
title={Downwash-aware Control Allocation for Over-actuated UAV Platforms},
author={Su, Yao and Chu, Chi and Wang, Meng and Li, Jiarui and Yang, Liu and Zhu, Yixin and Liu, Hangxin},
booktitle={Proceedings of International Conference on Intelligent Robots and Systems (IROS)},
year={2022},
publisher={IEEE}}
Related Work
2022 IEEE TCST (submittted) Fault-tolerant Control of Over-actuated Multirotor UAV Platform under Propeller Failure
2022 Mechatronics (submitted) Control and Experiments of a Novel Tiltable-Rotor Aerial Platform Comprising Quadcopters and Passive Hinges
2022 IEEE RAL/ICRA A Fast and Efficient Attitude Control Algorithm of a Tilt-Rotor Aerial Platform Using Inputs Redundancies
2021 IEEE RAL/IROS Nullspace-Based Control Allocation of Overactuated UAV Platforms
2021 IEEE RAL/IROS An Over-Actuated Multi-Rotor Aerial Vehicle With Unconstrained Attitude Angles and High Thrust Efficiencies
2021 IEEE CCTA A Simple Six Degree-of-Freedom Aerial Vehicle Built on Quadcopters